

MuJoCo(Multi-Joint dynamics with Contact)是一款专为机器人、生物力学及人工智能研发设计的通用多体动力学物理引擎。它最初由Emo Todorov开发,现由Google DeepMind维护并完全开源。MuJoCo的核心优势在于其独特的技术架构,它采用连续时间下的凸优化技术来处理复杂的接触动力学,在保证物理仿真高度精确的同时,兼具极快的计算速度。通过其特有的MJCF(XML格式)建模语言,科研人员可以快速构建从简单的倒立摆到复杂的人形机器人或骨骼肌肉系统。因其能高效支持强化学习算法的快速迭代,它已成为OpenAI Gym等主流AI实验平台的标准底层环境。总而言之,MuJoCo凭借其在接触模拟上的卓越稳定性和高效性能,成为了当前连接虚拟仿真与真实世界物理控制的重要桥梁,有需要的用户可以在本站免费下载使用。
软件特色
1、广义坐标动力学:
采用广义坐标系(Generalized Coordinates)而非笛卡尔坐标,能够更高效、准确地处理带有关节约束的多体系统。
2、独创的接触处理机制:通过将接触力学建模为凸优化问题,避开了传统引擎中常见的数值不稳定现象,实现了物理精度与仿真速度的平衡。
3、MJCF 建模语言:
使用基于 XML 的专有 MJCF 格式,支持分级建模、宏定义和参数引用,极大简化了复杂机器人模型的构建过程。
4、软约束与接触模型:
原生支持软接触和摩擦力模拟,能够精准还原抓取、滑动等复杂物理交互,非常适合精细操作研究。
5、肌肉骨骼系统仿真:
包含专门的驱动器模型,可模拟生物肌肉的收缩特性,使其成为生物力学领域研究人体运动的首选。
6、计算速度极快:
经过深度优化的 C 核心代码,支持并行仿真,能在短时间内生成海量的训练数据,满足强化学习的高强度需求。
MuJoCo的使用教程
1、本站下载好压缩文件解压后,你会在文件夹内看到 bin、include、model 等文件夹。
2、进入 bin 目录。
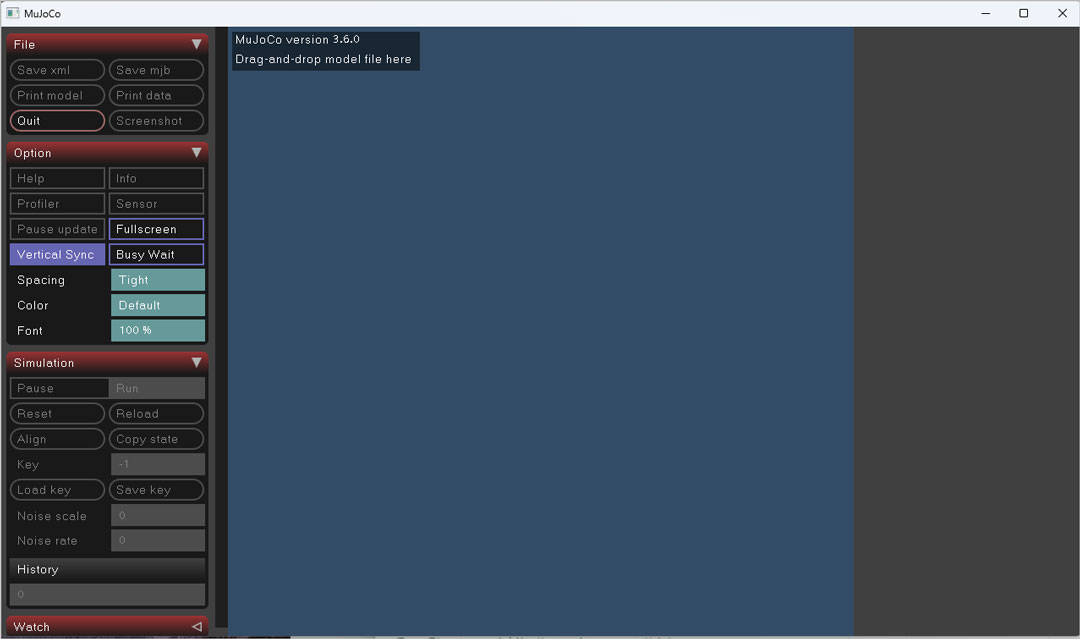
3、双击运行 simulate.exe(这是 MuJoCo 自带的可视化仿真器)。
4、你可以直接将 model 文件夹里的任何 .xml 文件(如 humanoid.xml)拖入 simulate.exe 的窗口中。
5、如果你能看到一个机器人模型并能用鼠标拖动它,说明软件已正常运行了
应用场景
1、AI 智能体训练:
如训练虚拟角色行走、跑步或完成精细的操作任务。
2、机器人算法验证:
在实机部署前,在仿真环境中测试路径规划与控制律。
3、人体运动科学:
模拟骨骼肌肉系统,分析人类运动的动力学特性。
软件亮点
【内建解析导数】
支持通过解析方法计算动力学导数,这对于基于梯度的轨迹优化(Trajectory Optimization)和最优控制至关重要。
【丰富的驱动器模型】
提供位置、速度、力矩以及特定电机特性的多种驱动器,可直接对应现实中各种电控或液压硬件。
【全场景可视化渲染】
内置基于 OpenGL 的快速渲染器,提供高质量的深度图输出和视觉检测功能,支持视觉导航算法的开发。
【完全开源与跨平台】
由 Google DeepMind 全面开源,支持 Windows、macOS 和 Linux,并提供原生的 Python 绑定,生态集成极其便利。
更新日志
v3.10.0版本
通用
添加了mju_threadpool,这是一个在mjData实例上创建线程池的新函数。初始化线程池时,模拟管道的部分内容(如跨岛的碰撞检测和约束求解)将并行化。当mjData被释放时,线程池会自动销毁。
添加了统一的日志记录API:
所有错误、警告和信息消息现在都通过一个接收结构化mjLogMessage的mjfLogHandler回调进行路由。
用户可以通过mjusetLogHandler安装自定义处理程序,通过mju_setLogConfig配置默认处理程序的行为(控制台/文件输出、主题过滤)。
消息可以通过mjuinfo和mjumessage发出。
新类型:mjtLogLevel、mjtLogTopic、mjLogMessage、mjLogConfig。
旧的回调函数mjuuser_error和mjuuser_warning已被弃用,但仍能正常工作。
添加了mjs_numWarnings和mjs_getWarning,用于检索在模型编译和附件过程中累积的所有警告。弃用mjs_isWarning,支持mjs_num警告>0。
添加了编译器/冲突属性,用于控制在附件过程中如何解决冲突的全局属性。可能的值有“警告”(默认值:父值优先,冲突时发出警告)、“合并”(每个字段的最小/最大/错误策略)和“错误”(任何冲突都会引发错误)。有关详细信息,请参见属性合并。
改进了float32下的原始求解器收敛性。@n3b在第2313期和@adenzler nvidia在MJWarp pull request 1374中最初提出的改进。
CG求解器现在使用Hager-Zhang共轭方向更新,而不是Polak Ribiere Plus公式。这提高了收敛性,并导致在float32下显著加速。
添加了mjs_makeFlex,这是一个相当于flexcomp元素的新C API函数,用于通过编程创建具有自动生成的实体、关节和相等约束的flex对象。在Python中作为body.make_flex()公开。
增加了对从OBJ线段加载1D柔性组件的支持
通过调用Qhull的Q9选项,显著提高了由maxhullvert属性生成的粗糙凸包的质量。 收起介绍展开介绍
- 下载地址
- 其他版本
-
{playpage:qitabanben_html}
发表评论
0人参与,3条评论软件排行榜
热门推荐
 PolyWorks Metrology Suite 2025 IR4中文特别版2.34G / 简体中文
PolyWorks Metrology Suite 2025 IR4中文特别版2.34G / 简体中文 Autodesk CAMplete TruePath 20271.12G / 英文
Autodesk CAMplete TruePath 20271.12G / 英文 solidworks2026中文特别版16.74G / 多国语言[中文]
solidworks2026中文特别版16.74G / 多国语言[中文] Room Arranger(房屋布局设计软件)42.9M / 简体中文
Room Arranger(房屋布局设计软件)42.9M / 简体中文 mastercam2027中文版2.13G / 简体中文
mastercam2027中文版2.13G / 简体中文 Autodesk AutoCAD Raster Design 2026 64位1.03G / 多国语言
Autodesk AutoCAD Raster Design 2026 64位1.03G / 多国语言 Autodesk InfoWater Pro 20271.81G / 英文
Autodesk InfoWater Pro 20271.81G / 英文 Autodesk Inventor Tolerance Analysis 2027929.48M / 英文
Autodesk Inventor Tolerance Analysis 2027929.48M / 英文 siemens solid edge 2026中文完整版10.16G / 多国语言[中文]
siemens solid edge 2026中文完整版10.16G / 多国语言[中文] Autodesk Vehicle Tracking 2027官方版860.74M / 英文
Autodesk Vehicle Tracking 2027官方版860.74M / 英文