

MuJoCo(Multi-Joint dynamics with Contact)是一款专为机器人、生物力学及人工智能研发设计的通用多体动力学物理引擎。它最初由Emo Todorov开发,现由Google DeepMind维护并完全开源。MuJoCo的核心优势在于其独特的技术架构,它采用连续时间下的凸优化技术来处理复杂的接触动力学,在保证物理仿真高度精确的同时,兼具极快的计算速度。通过其特有的MJCF(XML格式)建模语言,科研人员可以快速构建从简单的倒立摆到复杂的人形机器人或骨骼肌肉系统。因其能高效支持强化学习算法的快速迭代,它已成为OpenAI Gym等主流AI实验平台的标准底层环境。总而言之,MuJoCo凭借其在接触模拟上的卓越稳定性和高效性能,成为了当前连接虚拟仿真与真实世界物理控制的重要桥梁,有需要的用户可以在本站免费下载使用。
软件特色
1、广义坐标动力学:
采用广义坐标系(Generalized Coordinates)而非笛卡尔坐标,能够更高效、准确地处理带有关节约束的多体系统。
2、独创的接触处理机制:通过将接触力学建模为凸优化问题,避开了传统引擎中常见的数值不稳定现象,实现了物理精度与仿真速度的平衡。
3、MJCF 建模语言:
使用基于 XML 的专有 MJCF 格式,支持分级建模、宏定义和参数引用,极大简化了复杂机器人模型的构建过程。
4、软约束与接触模型:
原生支持软接触和摩擦力模拟,能够精准还原抓取、滑动等复杂物理交互,非常适合精细操作研究。
5、肌肉骨骼系统仿真:
包含专门的驱动器模型,可模拟生物肌肉的收缩特性,使其成为生物力学领域研究人体运动的首选。
6、计算速度极快:
经过深度优化的 C 核心代码,支持并行仿真,能在短时间内生成海量的训练数据,满足强化学习的高强度需求。
MuJoCo的使用教程
1、本站下载好压缩文件解压后,你会在文件夹内看到 bin、include、model 等文件夹。
2、进入 bin 目录。
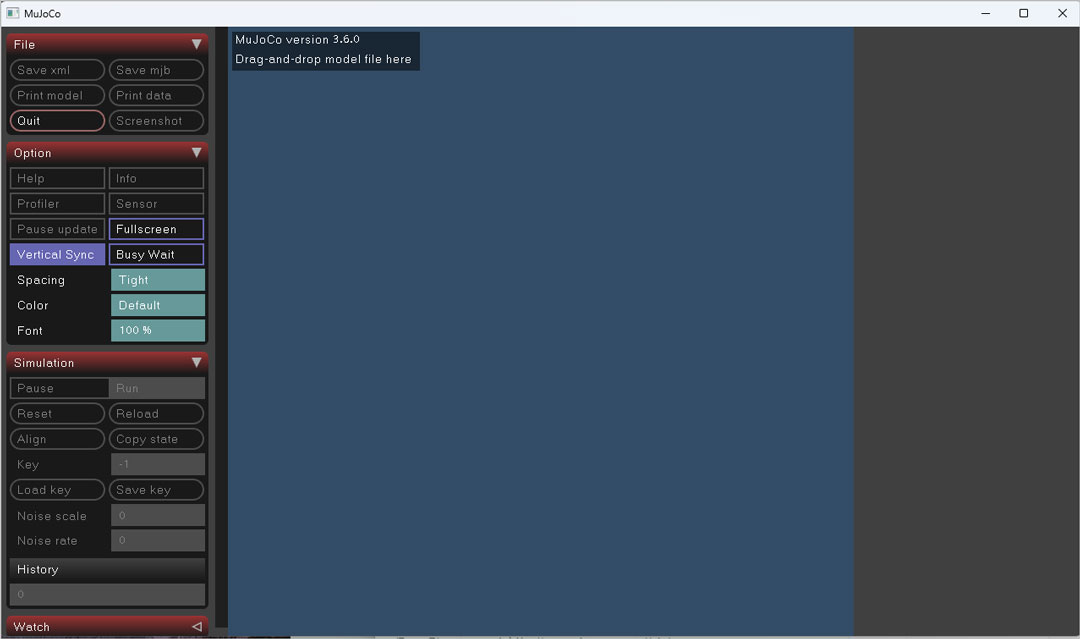
3、双击运行 simulate.exe(这是 MuJoCo 自带的可视化仿真器)。
4、你可以直接将 model 文件夹里的任何 .xml 文件(如 humanoid.xml)拖入 simulate.exe 的窗口中。
5、如果你能看到一个机器人模型并能用鼠标拖动它,说明软件已正常运行了
应用场景
1、AI 智能体训练:
如训练虚拟角色行走、跑步或完成精细的操作任务。
2、机器人算法验证:
在实机部署前,在仿真环境中测试路径规划与控制律。
3、人体运动科学:
模拟骨骼肌肉系统,分析人类运动的动力学特性。
软件亮点
【内建解析导数】
支持通过解析方法计算动力学导数,这对于基于梯度的轨迹优化(Trajectory Optimization)和最优控制至关重要。
【丰富的驱动器模型】
提供位置、速度、力矩以及特定电机特性的多种驱动器,可直接对应现实中各种电控或液压硬件。
【全场景可视化渲染】
内置基于 OpenGL 的快速渲染器,提供高质量的深度图输出和视觉检测功能,支持视觉导航算法的开发。
【完全开源与跨平台】
由 Google DeepMind 全面开源,支持 Windows、macOS 和 Linux,并提供原生的 Python 绑定,生态集成极其便利。
更新日志
v3.9.0版本
添加了mjData.efc_Y,白化的约束雅可比矩阵Y=JM−1/2,当使用对偶求解器(PGS或NoSlip)或启用diagexact时,在竞技场中分配。
添加了diagexact启用标志,它计算当前配置下约束空间惯性矩阵的精确对角线,取代了默认的编译时近似。这提高了具有各向异性惯性或复杂运动学耦合的模型的求解器质量。有关详细信息,请参阅精确对角线。
PGS求解器中的伪随机约束访问顺序,在上一版本中引入,现在使用固定的种子。以前的实现使用mjData.time进行种子化,这引入了微妙但不受欢迎的时间依赖性。
柔性体现在可以睡眠,完全被动(无约束)的柔性体除外。
通过新的mjtCTimer枚举和mjs_getTimer C API添加了编译器时间诊断。在mj_compile之后,每个类别的计时(总计、资源、网格加载、凸包、法线、惯性、BVH、八叉树、纹理)可以通过mjs_getTimer(spec)获得。编译示例在没有输出文件时运行时打印详细的计时分解。
添加了mjtBool来表示布尔变量,替换了mjModel、mjData和公共C API函数签名中的所有布尔字段。
破坏API更改
接触间隙和间隙参数的语义已被重新设计,以提高概念清晰度并与牛顿保持一致。有关详细信息,请参阅新的间隙和间隙文档部分。
以前,间隙控制检测阈值(当dist <间隙时存在接触),间隙从其中减去以产生力阈值(当dist <间隙 -间隙时生成力)。这不太直观:用户期望间隙表示几何膨胀,间隙表示空间间隙。
在新语义下,间隙是几何表面的膨胀,间隙是在膨胀表面之外的附加检测缓冲区:
检测:当dist <间隙 +间隙时创建接触。
力生成:当dist <间隙时应用约束力。
非活动接触:间隙 收起介绍展开介绍
- 下载地址
- 其他版本
-
{playpage:qitabanben_html}
发表评论
0人参与,3条评论软件排行榜
热门推荐
 PolyWorks Metrology Suite 2025 IR4中文特别版2.34G / 简体中文
PolyWorks Metrology Suite 2025 IR4中文特别版2.34G / 简体中文 Autodesk CAMplete TruePath 20271.12G / 英文
Autodesk CAMplete TruePath 20271.12G / 英文 solidworks2026中文特别版16.74G / 多国语言[中文]
solidworks2026中文特别版16.74G / 多国语言[中文] Room Arranger(房屋布局设计软件)42.9M / 简体中文
Room Arranger(房屋布局设计软件)42.9M / 简体中文 mastercam2027中文版2.13G / 简体中文
mastercam2027中文版2.13G / 简体中文 Autodesk AutoCAD Raster Design 2026 64位1.03G / 多国语言
Autodesk AutoCAD Raster Design 2026 64位1.03G / 多国语言 Autodesk InfoWater Pro 20271.81G / 英文
Autodesk InfoWater Pro 20271.81G / 英文 Autodesk Inventor Tolerance Analysis 2027929.48M / 英文
Autodesk Inventor Tolerance Analysis 2027929.48M / 英文 siemens solid edge 2026中文完整版10.16G / 多国语言[中文]
siemens solid edge 2026中文完整版10.16G / 多国语言[中文] Autodesk Vehicle Tracking 2027官方版860.74M / 英文
Autodesk Vehicle Tracking 2027官方版860.74M / 英文